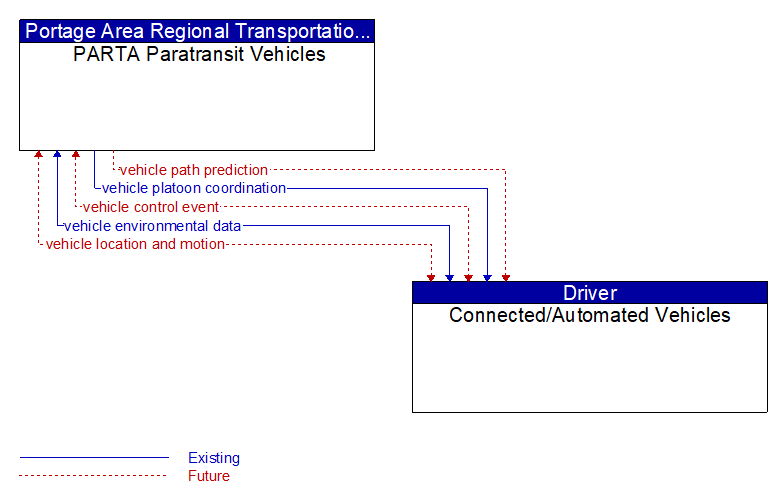
Interface: PARTA Paratransit Vehicles - Connected/Automated Vehicles
Information Flow Definitions
vehicle control event (Future) Selected Comm Solution
Notification that the vehicle has performed an emergency maneuver or action that could impact the safety of surrounding vehicles. This includes hard braking and activation of traction/stability control systems or other actions that warrant immediate notification of surrounding vehicles. The information flow conveys the current vehicle location, path, and current control actions. This may also include the list of maneuvers includes lane changes/departures and overtaking/passing maneuvers.
vehicle environmental data (Existing) Selected Comm Solution
Data from vehicle safety and convenience systems that can be used to estimate environmental and infrastructure conditions, including measured air temperature, exterior light status, wiper status, sun sensor status, rain sensor status, traction control status, anti–lock brake status, vertical acceleration and other collected vehicle system status and sensor information. The collected data is reported along with the location, heading, and time that the data was collected. Both current data and snapshots of recent events (e.g., traction control or anti–lock brake system activations) may be reported.
vehicle location and motion (Future) Selected Comm Solution
Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size.
vehicle path prediction (Future) Selected Comm Solution
The predicted future vehicle path of travel. This flow includes an indication of the future positions of the transmitting vehicle that can be used by receiving vehicles to support coordinated driving maneuvers and enhance in–lane and out–of–lane threat classification.
vehicle platoon coordination (Existing) Selected Comm Solution
Coordination of control commands between leader and follower vehicles allowing vehicles to join, coordinate with, and separate from platoons of cooperative vehicles. This flow shares platoon size, location, and performance parameters (e.g., platoon speed and spacing) between platooned vehicles. It also coordinates maneuvers between platooned vehicles, including maneuvers as vehicles join and leave the platoon.